News

Automotive SensorBox 2.0
we are happy to announce our latest SensorBox 2.0, which allows R&D, Universities and others, collect data for automated and autonomous driving or use it as a 2 Tier SensorStack Camera and 360
degree Lidar (an external Radar integration will follow) to run small and medium sized autonomous vehicles.
The SensorBox 2.0 can be setup in some minutes to a car and can be used
out of the box with the integrated Ubuntu 22.04 OS, ROS2 Humble, different preinstalled algorithms. So its fully Open Source and you can adapt it as you want or need.

Stuttgart Green AI Day
Our talk about:
Autonomous Driving and Sustainability.
How AI based autonomous systems can help to make our
cities more secure and green.
Stuttgart, 26 th of September 2024

Software defined Vehicle DemoCar on Hannover Fair 2024
We have been so proud to present our Software defined Vehicle DemoCar we build for Deloitte on the Hannover Faire 2024 and Deloitte got a lot of attention. The Car is equipped with:
1. Ouster OS1 Lidar
2. StereoCam and a back RGB Cam
3. Radar and UltraSonic Sensors
5. InCar Display
6. NVIDIA Jetson Orin AGX
7. Rasperry Pi 5 and Ardunio ESP32 (Cloud Connector)
We run several ML (Object Detection, Line Following, Pose Estimation,
Lidar Point Cloud, GenAI incl. scene explenation sound on it. Base OS
is ROS/ROS2.

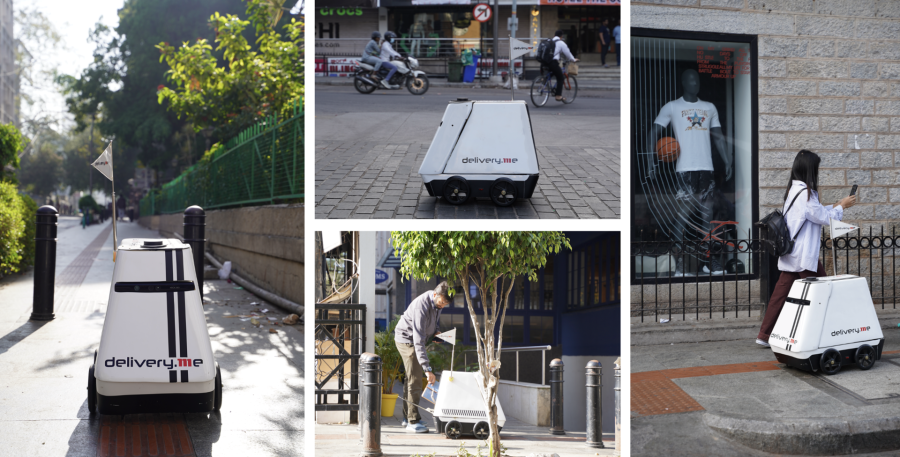
delivery-me robotics India
at the CAEV EXPO in Bangalore 14-15th of March 2024
Visit the Indian delivery-me team at the CAEV Expo from 14
to 15 th of March 2024 in Bangalore India.
Booth ADSAFE (Automotive Cyber Security) HB 223
Come and see our latest Indian delivery robot!

delivery-me robot
DemoCar presented at VDA Technical Congress in Berlin
Together with Deloitte Germany we had the great opportunity to present our Mercedes-Benz Autonomous Democar at the VDA Technical Congress in Berlin.
Thx to the Deloitte Team!
delivery-me robot
hits the streets of Bangalore/India.
Today was an amazing day for delivery-me team in Bangalore India. Our brand new Indian delivery robot hits the first time the streets of Bangalore downtown.
The Robot runs on NVIDIA Jetson Series, ROS and different algorithms.
It was a great Wow from the people which have been very suprized and amazed. Soon we come with more!
Great job of the indian team !!!

delivery-me robot test operate in german town
close to Stuttgart
Some weeks ago, we did first controlled and observed tests with our delivery-me robot in a small town close to stuttgart. Target was it, to collect experience,
data and see the reaction and exceptance from the people on the street.
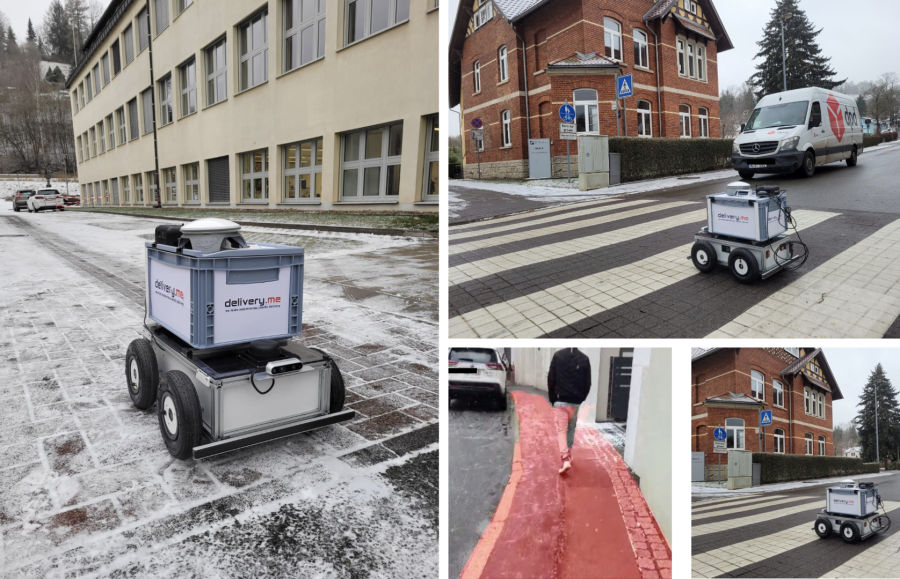
University of Applied Science Schmalkalden
is using delivery-me robots
Our delivery-me robot landed at University for applied science in Schmalkalden. Here some impressions of the onboarding day. Together with the student team and
Prof. Frank Schrödel we work on further developments of delivery robots.

Urban Future 2023 in Stuttgart - Germany
Visit us !
Haus der Wirtschaft
Willi-Bleicher-Straße 19, 70174 Stuttgart
https://www.hausderwirtschaft.de/
Wednesday, June 22, 2023, 09-17:30 Uhr
StartUp Zone